【平成28年3月24日判決言渡 (平成27年(行ケ)第10087号) 審決取消請求事件】
【キーワード】
特許法29条2項、進歩性
【要旨】
1 本件は,発明の名称を「立体映像信号生成回路及び立体映像表示装置」とする特許に対し,原告が無効審判請求をしたが,特許庁が不成立審決をしたため,原告が不成立審決の取消しを求めた事案である。
2 本件の争点は,進歩性の判断における引用発明との相違点の認定である。本判決は、本件発明と引用発明との間において,特許庁が認定した相違点は存在しないいとした。
【経緯】
| H14 11.28 |
被告は,発明の名称を「立体映像信号生成回路及び立体映像表示装置」とする発明につき特許出願を行った。 特願2002-345155号(以下「本件特許出願」という。) |
| H19 6.29 |
被告は,本件特許出願について,特許権の設定登録を受けた。 特許第3978392号(以下「本件特許」という。) |
| H26 6.11 |
原告は,本件特許について,特許無効審判を請求した。 |
| H27 3.31 |
特許庁は,無効2014-800097事件として審理を行い,不成立審決をした。 |
| H27 5.11 |
原告は,不成立審決について,審決の取消しを求めて審決取消訴訟を提起した。 |
【発明の概要】
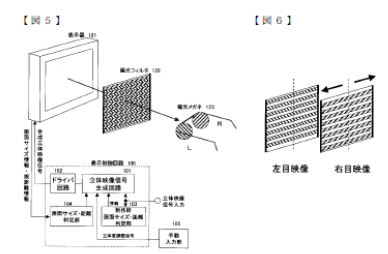
本願発明は映像表示装置に関し,表示画面サイズに応じて立体度を変化させることができる立体映像信号生成回路及び該回路を使用した立体映像表示装置に関する。
従来,立体映像を撮影する場合には,二つの撮影部を備え,第1撮影部によって右目映像を,第2撮像部によって左目映像を撮影している。このとき,第1撮像部の光軸と第2撮像部の光軸とを撮影対称面上で交差させ収束点であるクロスポイント(コンバージェンスポイント)CPを形成して,立体映像を撮影している。そして,撮影対称面から撮影装置までの距離(すなわち,CPまでの距離)を測定する技術が提案されている。
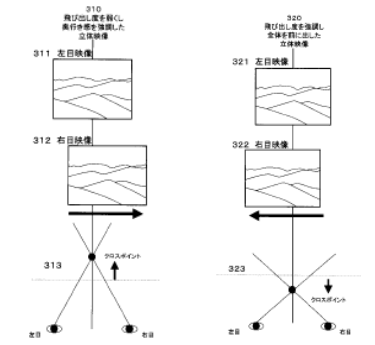
しかし,立体映像を撮影する際にCPまでの距離を測定しても,CPまでの距離(CP情報) が立体映像と同時に記録されることはなかった。また,CP情報が記録されていても,立体映像が再生されるときに,CP情報が立体感の基準となる信号として活用されることはなかった。
本発明は,CP情報を活用することによって,画面サイズが異なる表示装置で再生しても,自然な飛び出し量の立体映像を得ることができる立体映像表示装置及びこれに用いる立体映像信号生成回路を提供することを目的とする。
本件の争点となった請求項1にかかる発明(以下「本願発明」という。)は,以下のとおりである。
【請求項1】
A 左右眼の視差作用によって立体視可能な映像を表示する立体映像表示装置に立体映像信号を供給する立体映像信号生成回路であって,
B 前記立体視可能な映像に関する映像情報,及び,前記立体映像表示装置に関する表示装置情報を取得する情報取得手段と,
C 前記映像情報及び前記表示装置情報に基づいて前記左目映像と前記右目映像とをずらして表示するためのオフセットを設定して,表示される映像の立体感を調整するオフセット設定手段と,を備え,
D 前記情報取得手段は,立体映像に関連づけて定められた,左目映像用カメラの光軸と右目映像用カメラの光軸との間の距離に関するカメラ距離情報,及び,
E 左目映像用カメラの光軸と右目映像用カメラの光軸との交差点までの距離に関するクロスポイント情報を前記映像情報として取得し,
F 前記オフセット設定手段は,前記カメラ距離情報及び前記クロスポイント情報に基づいて左目映像と右目映像とのオフセットを設定して,表示される映像の立体感を調整することを特徴とする立体映像信号生成回路。
【審決の理由の要旨】
本件審決は,甲3(特開平8-9421号公報)に記載された本件発明1に対応するものを「甲3A発明」として,以下の様に認定した。
甲3A発明
視差を利用した立体視を実現できる立体表示装置に映像信号を出力する水平シフト回路を制御するCPUであって,
正常な立体視ができるようにするために,2台のビデオカメラの間隔である光軸間距離と2台のビデオカメラの光軸のなす角度である輻輳角と,立体表示装置の種類や大きさ等によって決定される適視距離を利用し,
2台のビデオカメラの間隔である光軸間距離と2台のビデオカメラの光軸のなす角度である輻輳角に基づいて求められる主要被写体Xのモニタ面上の視差と,立体表示装置の種類や大きさ等によって決定される適視距離が決まることにより決定される立体表示装置の限界視差とに基づいて,主要被写体Xの立体像位置範囲が限界立体像位置範囲を前方向または後方向に越えるか否かを判別し,主要被写体Xの立体像位置が限界立体像範囲内になく,正常な立体視ができないと判別されたときには,左右画像を,視差量及び2台のビデオカメラの間隔や輻輳角といった撮像手段の制御パラメータに基づく水平シフト制御によりシフトさせ,主要被写体の立体像位置を限界立体像範囲内に収まるようにすることにより正常な立体視ができるようにすることを特徴とする水平シフト回路を制御するCPU。
そして,本件特許発明1と甲3A発明の相違点を,以下の様に認定した。
1.相違点1
「立体映像信号生成回路を制御する手段が,本件特許発明1は,立体映像信号生成回路自体であるのに対し,甲3A発明は,CPUである点。」
2.相違点2
「オフセット設定手段に関して,本件特許発明1は,立体感を調整するものであるのに対し,甲3A発明は,正常な立体視ができないと判別されたものを,正常な立体視ができるようにする点。」
3.相違点3
「クロスポイント情報に関して,本件特許発明1は,「左目映像用カメラの光軸と右目映像用カメラの光軸との交差点までの距離」であるのに対し,甲3A発明は,「2台のビデオカメラの光軸のなす角度である輻輳角」である点。」
以上を踏まえ,本件審決は,本件特許発明1は,甲3に記載された発明であるとも,甲3に記載された発明から容易に発明できたともいうことはできないから,特許法29条1項3号又は同条2項の規定に該当しないとした。
【争点】
相違点2は相違点か否か
【判旨抜粋】
本件判決は,甲3に記載された発明を甲3A’発明として以下の様に認定した上で,相違点2は相違点ではないとした。
「視差を利用した立体視を実現できる立体表示装置に映像信号を出力する水平シフト回路を制御するCPUであって,
正常な立体視ができるようにするために,2台のビデオカメラの間隔である光軸間距離と2台のビデオカメラの光軸のなす角度である輻輳角と,立体表示装置の種類や大きさ等によって決定される適視距離を利用し,
2台のビデオカメラの間隔である光軸間距離と2台のビデオカメラの光軸のなす角度である輻輳角に基づいて求められる主要被写体Xのモニタ面上の視差と,立体表示装置の種類や大きさ等によって決定される適視距離が決まることにより決定される立体表示装置の限界視差とに基づいて,主要被写体Xの立体像位置範囲が限界立体像位置範囲を前方向または後方向に越えるか否か,主要被写体Xの立体像位置範囲がモニタ面の近傍付近に位置するか否かを判別し,主要被写体Xの立体像位置が限界立体像範囲内にないと判別されたときには,主要被写体の立体像位置を限界立体像範囲内に収まるように,左右画像が水平シフトせしめられ,求められた主要被写体の立体像位置がモニタ面の近傍付近にあると判別されたときには,限界立体像位置範囲内において,主要被写体の立体像位置を前方にシフトさせるように左右画像をシフト制御することにより,立体感を増加させることを特徴とする水平シフト回路を制御するCPU。」
1.甲3A’発明の「2台のビデオカメラの間隔である光軸間距離と2台のビデオカメラの光軸のなす角度である輻輳角」は本件特許発明1の「立体視可能な映像に関する映像情報」に対応し,「立体表示装置の種類や大きさ等によって決定される適視距離」は本件特許発明1の「立体映像表示装置に関する表示装置情報」に対応する。
そして,甲3A’発明についての記載ではなく,制御信号各領域の視差量に基づいて制御を行う場合の記載ではあるものの,甲3の段落【0032】には,立体像位置範囲が限界立体像位置範囲内に収まっていても,立体像位置範囲がモニタ面の近傍付近にあり,立体感がさほどでない場合に,限界立体像位置範囲内において,立体像位置範囲を前方にシフトさせるように左右画像をシフト制御し,立体感を増加させることが記載されている。このような制御の技術的意義が甲3A’発明において異なる理由はないから,甲3A’発明において,主要被写体Xの立体像位置範囲がモニタ面の近傍付近に位置するか否かを判別することも,同様に,主要被写体Xの立体像位置範囲が限界立体像位置範囲内に収まる,すなわち立体視が可能な状態である場合であることを前提に,立体像位置範囲がモニタ面の近傍付近にあることにより立体感がさほどではない場合に,左右画像をシフト制御することにより立体感を増す必要があるかどうかを判定するためになされるものであると認められる。そして,甲3A’発明においては,主要被写体の立体像位置がモニタ面の近傍付近にあると判別された場合には,限界立体像位置範囲内において,主要被写体の立体像位置を前方にシフトさせるように左右画像をシフト制御することにより,立体感を増加させることとなる。
加えて,甲3A’発明においては,左右画像を水平シフト制御によりシフトする制御が行われているのであるから,この制御の内容を設定しこれを行うための手段を有しているものと認められる。
そうすると,甲3A’発明のうち,「2台のビデオカメラの間隔である光軸間距離と2台のビデオカメラの光軸のなす角度である輻輳角に基づいて求められる主要被写体Xのモニタ面上の視差と,立体表示装置の種類や大きさ等によって決定される適視距離が決まることにより決定される立体表示装置の限界視差とに基づいて,」「主要被写体Xの立体像位置範囲がモニタ面の近傍付近に位置するか否かを判別し,」「求められた主要被写体の立体像位置がモニタ面の近傍付近にあると判別されたときには,限界立体像位置範囲内において,主要被写体の立体像位置を前方にシフトさせるように左右画像をシフト制御することにより,立体感を増加させる」との構成は,映像情報及び表示装置情報に基づいて,既に立体的に見える映像について,主要被写体の立体像位置を前方にシフトさせるように左右画像をシフト制御,すなわちずらすことにより,表示される映像の立体感の感じ度合いを整える手段であるものと認められる。
以上によれば,甲3A’発明の「2台のビデオカメラの間隔である光軸間距離と2台のビデオカメラの光軸のなす角度である輻輳角に基づいて求められる主要被写体Xのモニタ面上の視差と,立体表示装置の種類や大きさ等によって決定される適視距離が決まることにより決定される立体表示装置の限界視差とに基づいて,主要被写体Xの立体像位置範囲が限界立体像位置範囲を前方向または後方向に越えるか否か,主要被写体Xの立体像位置範囲がモニタ面の近傍付近に位置するか否かを判別し,主要被写体Xの立体像位置が限界立体像範囲内にないと判別されたときには,主要被写体の立体像位置を限界立体像範囲内に収まるように,左右画像が水平シフトせしめられ,求められた主要被写体の立体像位置がモニタ面の近傍付近にあると判別されたときには,限界立体像位置範囲内において,主要被写体の立体像位置を前方にシフトさせるように左右画像をシフト制御することにより,立体感を増加させる」は,本件特許発明1の「前記映像情報及び前記表示装置情報に基づいて前記左目映像と前記右目映像とをずらして表示するためのオフセットを設定して,表示される映像の立体感を調整するオフセット設定手段」に相当する。
2. また,甲3A’発明の「2台のビデオカメラの間隔である光軸間距離と2台のビデオカメラの光軸のなす角度である輻輳角」について,「2台のビデオカメラの間隔である光軸間距離」は,本件特許発明1の「左目映像用カメラの光軸と右目映像用カメラの光軸との間の距離に関するカメラ距離情報」に対応する。さらに,甲3A’発明の「2台のビデオカメラの光軸のなす角度である輻輳角」は,この「輻輳角」と「カメラ距離情報」を用いてクロスポイント及びクロスポイントまでの距離を特定することができるという意味において,本件特許発明1の「左目映像用カメラの光軸と右目映像用カメラの光軸との交差点までの距離に関するクロスポイント情報」と共通する。そうすると,甲3A’発明は,カメラ距離情報及びクロスポイント情報に基づいて,「主要被写体Xの立体像位置範囲がモニタ面の近傍付近に位置するか否かを判別し,」「求められた主要被写体の立体像位置がモニタ面の近傍付近にあると判別されたときには,限界立体像位置範囲内において,主要被写体の立体像位置を前方にシフトさせるように左右画像をシフト制御することにより,立体感を増加させる」ものであると認められる。
上記の点に,前記1で認定した点を踏まえると,甲3A’発明の「2台のビデオカメラの間隔である光軸間距離と2台のビデオカメラの光軸のなす角度である輻輳角に基づいて求められる主要被写体Xのモニタ面上の視差と,立体表示装置の種類や大きさ等によって決定される適視距離が決まることにより決定される立体表示装置の限界視差とに基づいて,主要被写体Xの立体像位置範囲が限界立体像位置範囲を前方向または後方向に越えるか否か,主要被写体Xの立体像位置範囲がモニタ面の近傍付近に位置するか否かを判別し,主要被写体Xの立体像位置が限界立体像範囲内にないと判別されたときには,主要被写体の立体像位置を限界立体像範囲内に収まるように,左右画像が水平シフトせしめられ,求められた主要被写体の立体像位置がモニタ面の近傍付近にあると判別されたときには,限界立体像位置範囲内において,主要被写体の立体像位置を前方にシフトさせるように左右画像をシフト制御することにより,立体感を増加させる」ことは,本件特許発明1の「前記オフセット設定手段は,前記カメラ距離情報及び前記クロスポイント情報に基づいて左目映像と右目映像とのオフセットを設定して,表示される映像の立体感を調整する」ことに相当する。
3.・・・甲3A’発明は,本件特許発明1の「前記映像情報及び前記表示装置情報に基づいて前記左目映像と前記右目映像とをずらして表示するためのオフセットを設定して,表示される映像の立体感を調整するオフセット設定手段」及び「前記オフセット設定手段は,前記カメラ距離情報及び前記クロスポイント情報に基づいて左目映像と右目映像とのオフセットを設定して,表示される映像の立体感を調整する」
との構成をいずれも備えるものであると認められる。
4.以上によれば,本件特許発明1と甲3A’発明との間の相違点2・・・を認定した本件審決には誤りがある。
そして,本件審決は,本件特許発明1と甲3A’発明・・・とのその余の各相違点について,いずれも当業者が容易に想到し得たものである旨判断しているから,本件審決の上記の相違点の認定の誤りは,本件審決の結論に影響を及ぼすことが明らかである。
【考察】
1 進歩性の判断基準
進歩性の判断は,①本願発明の認定,②引用発明の認定,③本願発明と引用発明との一致点,相違点の認定,④相違点が証拠に示されているか,⑤相違点が証拠に示されている場合,容易想到か,によって判断されるが,今回の争点となったのは,③である。一致点と相違点の認定は,その後の議論の前提となるものであり,仮に相違点が存在しないとなれば,組合せの容易性などの議論が不要になるから,一致点と相違点の認定の誤りは大きな影響を及ぼすことになる。
2 知財高裁の判断
審決は,オフセット設定手段に関して,本件特許発明1は,立体感を調整するものであるのに対し,甲3A発明は,正常な立体視ができないと判別されたものを,正常な立体視ができるようにする点が相違点であるとした。すなわち,本件特許発明1は,既に立体的に見える映像について,その感じ度合いを整える発明であるのに対し,甲3A発明は,元々立体として見えていないものに対して見え方が整えられる発明であるとしている。
一方知財高裁は,甲3A’発明を新たに認定したうえで,明細書を詳細に検討し,本件特許発明1の「前記映像情報及び前記表示装置情報に基づいて前記左目映像と前記右目映像とをずらして表示するためのオフセットを設定して,表示される映像の立体感を調整するオフセット設定手段」及び「前記オフセット設定手段は,前記カメラ距離情報及び前記クロスポイント情報に基づいて左目映像と右目映像とのオフセットを設定して,表示される映像の立体感を調整する」との構成をいずれも備えるとした。
3 考察
一致点・相違点の認定は,技術的に同一か否かが問題となるため,法律論というよりは純粋な技術議論になりやすい。本件においても,立体表示装置における立体的映像について,より立体感を感じやすくするようにする手段が,甲3に記載されているかが問題となっており,技術的な理解が必要となる。
本件では,審決が明細書の記載の一部のみをもって相違点を認定しているのに対し,知財高裁は,明細書の記載を参酌しながら,その裏にある技術的な意義を明らかにして同一性を認定しており,常識的な判断がなされている。
このように,知財高裁は,明細書の記載のわずかな違いを持って相違点であるとはしないが,明細書の記載から離れて純粋な技術議論をしているわけでもない。このあたりのさじ加減をどう主張に生かして裁判所を説得できるかが,代理人の腕にかかっているといえる。

