【平成30年4月16日判決(知財高裁 平成29年(行ケ)第10139号)】
【要旨】
名称を「モニタリング装置及び方法」とする特許出願が拒絶査定され,不服審判請求も,不成立と審決されたので,審決の取消しを求めた事案である。原告は,本願補正発明の容易想到性に係る判断の誤りを主張したところ,裁判所は,本願補正発明は引用発明及び周知技術に基づいて,当業者が容易に発明をすることができたものではないとして,請求を認容した事例。
【キーワード】
特許法第29条2項,進歩性,設計事項
1.事案の概要
(1)手続の経緯等
原告は,平成24年5月10日,発明の名称を「モニタリング装置及び方法」とする国際出願をし,その後,国内移行の手続をとった(特段2014-509742号)。
原告は,平成27年11月12日付けで拒絶査定を受け,平成28年3月24日,これらに対す不服審判を請求するとともに,特許請求の範囲を補正した(以下「本件補正」という。)。
特許庁は,これを,不服2016-4465号事件として審理し,平成29年2月20日,本件補正を却下した上で,請求不成立審決(以下「本件審決」という。)をした。
原告が本件審決の取り消しを求める訴訟が本件訴訟である。
(2)本件補正後の請求項1に記載された発明(以下「本願補正発明」という。)の内容
本願補正発明は以下のとおりである。
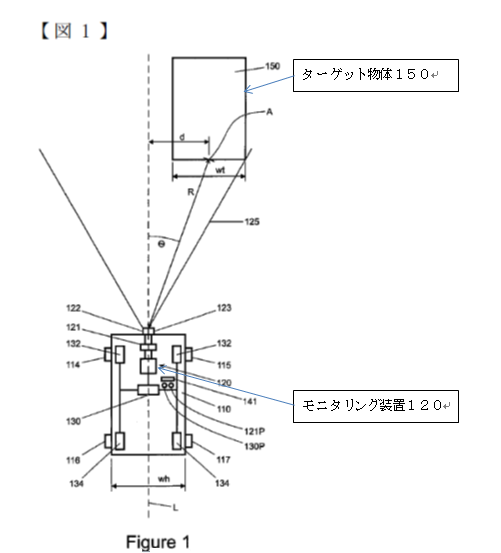
| A | レーダー送信機及びレーダー受信機を備えるレーダーセンサを用いてホスト自動車の外部の環境で1又は複数のターゲット物体をモニタリングするための装置であって, |
| B | 前記装置は,前記ホスト自動車と前記1又は複数のターゲット物体との間の所定の相対移動の検知に応答して少なくとも1のアクションを始動するように構成され, |
| C | 前記装置は,前記ホスト自動車の延伸軸からの前記ターゲット物体又は各ターゲット物体の距離である横方向オフセット値を判断し,前記横方向オフセット値に基づいて前記少なくとも1のアクションの始動が行われないように,前記少なくとも1のアクションの始動を無効にし, |
| D | 前記装置は,前記レーダーセンサの出力に応じて前記ターゲット物体又は各ターゲット物体の前記横方向オフセット値を判断するように構成された |
| E | 装置。 |
(3)本願補正発明と引用発明との一致点及び相違点
ア 一致点
レーダー送信機及びレーダー受信機を備えるレーダーセンサを用いてホスト自動車の外部の環境で1又は複数のターゲット物体をモニタリングするための装置であって,/前記装置は,前記ホスト自動車と前記1又は複数のターゲット物体との間の所定の相対移動の検知に応答して少なくとも1のアクションを始動するように構成され,/前記装置は,前記ホスト自動車の延伸軸からの前記ターゲット物体又は各ターゲット物体の距離である横方向オフセット値を判断し,前記横方向オフセット値に基づいて前記少なくとも1のアクションの開始が行われないようにし,/前記装置は,前記レーダーセンサの出力に応じて前記ターゲット物体又は各ターゲット物体の前記横方向オフセット値を判断するように構成された装置。
イ 相違点
本願補正発明では,ターゲット物体又は各ターゲット物体の「横方向オフセット値に基づいて前記少なくとも1のアクションの始動が行われないように,前記少なくとも1のアクションの始動を無効にし」ているのに対し,引用発明では「各特定存在物Cnの変位量ΔQ’(Cn)の絶対値」,つまり,「幅方向において自車線中心線COLからどの程度離れているか」の値(本願補正発明における「横方向オフセット値」に相当する。)が,「自車線幅WOLより大きい場合に,制御における対象から外され」,「絞込み」により除外されたその「特定存在物」については,「自車線上に存在」しないと「判定」し,これにより,「v)ACC・PCS作動ルーチン」における「PCS制御」や「減速ACC制御」の「制御における対象から外され」,「作動装置」の「作動が開始」することはないものの,「作動装置」の「作動が開始」することを無効にする,とは明記されていない点。
(4)争点
本願補正発明の進歩性判断に誤りがあるか
(1) 引用発明の認定の誤り及び相違点の看過があるか
(2) 相違点の容易想到性判断に誤りがあるか
本記事では(2)のうち引用発明における条件判断の順序を入れ替えた点についてのみを対象とする。
2.裁判所の判断(下線は筆者が付した)
引用発明の認定について本件審決に誤りはなく,また,本件審決に,本願補正発明と引用発明との対比についての誤りはない旨の判断をした上で,相違点の容易想到性判断について,以下のとおり判断した。
イ 相違点の容易想到性判断
(ア) 引用発明
引用発明の衝突対応車両制御は,衝突対応制御プログラムが実行されることによって行われる。同プログラムは,S1の自車線上存在物特定ルーチン及びS2のACC・PCS対象特定ルーチンにおいて,自車線上の存在物であるか否かという条件の充足性が判断され,その後に処理されるS5のACC・PCS作動ルーチンにおいて,自車両の速度,ブレーキ操作部材の操作の有無,自車両と直前存在物との衝突時間や車間時間等の条件に応じて,特定のACC制御やPCS制御が開始され,又は開始されないというものである。
(イ) 条件判断の順序の入替えについて
本願補正発明では,ターゲット物体との相対移動の検知に応答してアクションを始動するように構成された後に,自車線上にある存在物を特定し,アクションの始動を無効にするという構成が採用されている。したがって,引用発明を,相違点に係る本願補正発明の構成に至らしめるためには,少なくとも,まず,自車線上の存在物であるか否かという条件の充足性判断を行い,続いて,特定のACC制御やPCS制御を開始するために自車両の速度等の条件判断を行うという引用発明の条件判断の順序を入れ替える必要がある。
しかし,引用発明では,S1及びS2において,自車線上の存在物であるか否かという条件の充足性が判断される。この条件は,ACC制御,PCS制御の対象となる前方存在物を特定するためのものである(引用例【0091】)。そして,引用発明は,これにより,多数の特定存在物の中から,自車線上にある存在物を特定し,ACC制御,PCS制御の対象となる存在物を絞り込み,ACC制御,PCS制御のための処理負担を軽減することができる。一方,ACC制御,PCS制御の対象となる存在物を絞り込まずに,ACC制御,PCS制御のための処理を行うと,その処理負担が大きくなる。このように,引用発明において,自車線上の存在物であるか否かという条件の充足性判断を,ACC制御,PCS制御のための処理の前に行うか,後に行うかによって,その技術的意義に変動が生じる。
したがって,複数の条件が成立したときに特定のアクションを始動する装置において,複数の条件の成立判断の順序を入れ替えることが通常行い得る設計変更であったとしても,引用発明において,まず,特定のACC制御やPCS制御を開始するために自車両の速度等の条件判断を行い,続いて,自車線上の存在物であるか否かという条件の充足性判断を行うという構成を採用することはできない。
よって,引用発明における条件判断の順序を入れ替えることが,単なる設計変更であるということはできないから,相違点に係る本願補正発明の構成は,容易に想到することができるものではない。
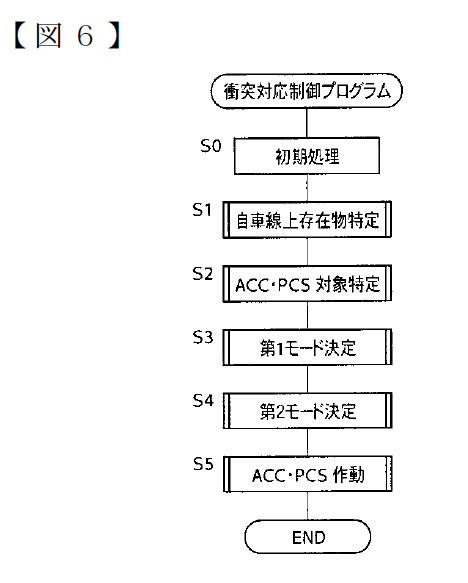
(引用発明の【図6】)
3.検討
本件は,本願補正発明についての容易想到性を否定したものである。本判決は「複数の条件が成立したときに特定のアクションを始動する装置において,複数の条件の成立判断の順序を入れ替えることが通常行い得る設計変更であったとしても」とした上で,「引用発明において,まず,特定のACC制御やPCS制御を開始するために自車両の速度等の条件判断を行い,続いて,自車線上の存在物であるか否かという条件の充足性判断を行うという構成を採用することはできない。」と判断している。このような判断に至った理由は,処理手順の順序によって技術的意義が異なる点にある。つまり,引用発明における処理手順であれば,処理負担が軽減されるのに対し,処理の順番を入れ替えると処理負担が大きくなってしまう点が異なる。
ところで,処理手順を入れ替えることについて,「本願発明では,ステップBにおいて,受信者識別子及び送信者識別子を用いて,第1ないし第3のセキュリティー状態の判断を行うものであるのに対し,引用発明においてif構文で処理方法を登録されたサーバは,受信者識別子を用いて第1のセキュリティー状態又は第2のセキュリティー状態に振り分けた後に,送信者識別子を用いて更に第3のセキュリティー状態に振り分けることを順番に行うものであるが(【0093】等),その振り分けの結果に違いはなく,いずれの処理手順とするかは,当業者において適宜選択し得るものである。」と判断した事例もある(平成25年4月11日判決(知財高裁 平成24年(行ケ)第10214号))
本判決も別件判決も,表現は異なるものの,処理手順を入れ替えることによって技術的意義に変動が生じるかどうかを重視していると思われる点において共通するものと考えられる。
以上
(文責)弁護士・弁理士 梶井啓順

